La interfase
de los motores se puede hacer mediante transistores
Darlington, transistores FET o relés.
Sin embargo, una solución
mucho mejor se obtiene utilizando un controlador
de puente en H desde el circuito integrado del controlador
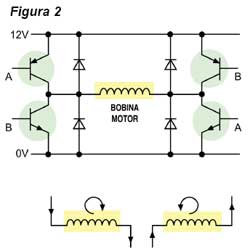
de motor L293D. El diagrama de la figura 2 muestra
el funcionamiento del puente en H. Cuando los transistores
“A” están encendidos, la corriente
fluye por el motor en una dirección. Cuando
los transistores “B” están encendidos,
la corriente fluye en la dirección contraria,
y por lo tanto el motor gira en reversa.
Naturalmente, es importante nunca
encender ambos juegos de transistores a la vez,
ya que esto causaría un cortocircuito entre
los carriles de potencia!
El L293D provee todos los circuitos
necesarios para controlar los motores de esta manera,
y también para prevenir la condición
de cortocircuito.
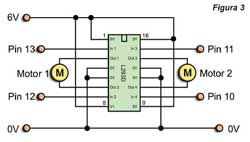
La figura 3 muestra el diagrama
completo del circuito del controlador de motor L293D.
Los pines del microcontrolador pueden controlar
directamente tanto a los ojos LED como al zumbador.
Un zumbador es mucho más conveniente que
un timbre, ya que con el se pueden producir una
gran variedad de tonos distintos y además
también consume mucha menos corriente que
el timbre.
En la figura 4 se muestra el diagrama
completo del circuito. La única “extra”
es una resistencia de 4k7 utilizada para deshabilitar
el pin de “REINICIO” del microcontrolador.
Se utiliza un resonador de cerámica de 4MHz
y 3 pines (patas exteriores conectadas a los pines
15 y 16, pata central conectada a 0V) para configurar
la frecuencia del reloj del microcontrolador (sólo
en el antiguo PIC16F84A).
(Nota: Resonador no requerido para
el PIC16F627)
Para comenzar, se podría
utilizar un procedimiento sencillo que involucre
las siguientes secuencias de acciones:
“Moverse hacia adelante hasta
golpear un microinterruptor. Al golpear el microinterruptor,
moverse hacia atrás por dos segundos, girar
por un segundo y luego moverse hacia delante en
la nueva dirección”
Este procedimiento consta
de tres partes:
-
1. Moverse hacia
adelante
Para hacer esto es necesario ajustar
en high los pines de salida 4 y 6, de manera
que el controlador L293D haga girar a ambos
motores hacia delante.
-
2. Esperar hasta
golpear el microinterruptor
Para hacer esto se debe monitorar continuamente
las entradas 0 y 1 hasta que estén en
high.
-
3. Secuencia de
Giro y Reversa
Para dar marcha atrás los pines
de salida 5 y 7 deben ajustarse en high por
dos segundos. Luego las salidas 5 y 6 deben
ajustarse en high para que el cochecito gire
por 1 segundo. Luego el programa debe saltar
de vuelta al paso 1, de manera que el cochecito
comience a moverse hacia delante nuevamente.
Nota: este producto
no es un juguete y debe mantenerse alejado del alcance
de niños pequeños, debido a que posee
partes pequeñas y extremos filosos. La soldadura
es una actividad peligrosa que debe ser llevada
a cabo bajo la supervisión de un adulto y
siempre en un área bien ventilada.
- El controlador de motor L293D se calienta durante
el uso, esto es normal.
- Para esta aplicación se recomiendan pilas
AA alcalinas.
Los pines de entrada/salida sobrantes
del microcontrolador se conectan a terminales sobre
el circuito impreso del microcontrolador. Esto permite
la conexión de sensores o dispositivos de
salida adicionales si se desea.
El Programa de Prueba del Cochecito
para microcontrolador PICAXE18, lo publicamos en
la figura 5. |