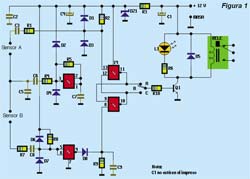
En la figura
1 se puede apreciar el circuito eléctrico
de nuestro circuito que puede resultar muy útil
para que no nos sorprendan las tormentas repentinas,
sudestadas o algún otro fenómeno que
puede inundar el garage de nuestra casa o el sótano
de un edificio.
Se emplean 4 compuertas NAND de un circuito integrado
CMOS tipo CD4093 y un transistor de alta ganancia
de uso general como el BC549C (este componente
puede ser reemplazado por cualquier darlington
de baja potencia).
La primera compuerta NAND está conectada
en configuración como oscilador cuya frecuencia
se ajusta por medio de R5 y C7. Normalmente se
utiliza una señal de baja frecuencia (unos
100Hz) que servirá para alimentar a los
sensores. Esto es así porque dichos sensores
estarán en contacto con el agua y de aplicar
una tensión continua se podría producir
el fenómeno de electrólisis.
Consideremos primero que se cortocircuitúa
la entrada correspondiente al sensor B, en ese
caso, la señal alterna producida por la
primera NAND se aplica a la entrada de una segunda
compuerta a través de R7 y C8. Dicha compuerta
actúa como bufer inversor que aisla el
bloque de entrada con el de actuación.
Por tratarse de componentes CMOS, es aconsejable
proteger las entradas de las compuertas de estáticas
y sobretensiones; por ello se colocan diodos protectores
como D1 y D3, D2 y D4 y D6 junto a D7.
Prosiguiendo con la explicación del funcionamiento
de este circuito para el caso en que se ha “cerrado”
o activado el sensor B, note que a la salida del
inversor (compuerta que se encuentra en la parte
inferior del circuito) se coloca un rectificador
que convierte la señal alterna producida
por el oscilador en un nivel de continua que se
aplica a un flip-flop conformado por las dos compuertas
restantes del CD4093. Deducimos entonces que si
en el sensor B colocamos dos electrodos que detecten
la presencia de un líquido, cuando esto
sucede (baja la resistencia entre bornes del sensor),
aparece un “1” lógico en la
pata 8 del FF. Por tratarse de un FF tipo RS,
en la pata 10 del CD4093 tendremos un “0”
lógico de tal forma que si llave se encuentra
hacia abajo (conectando B con C), el transistor
se encuentra cortado y el relé estará
desenergizado. Se deduce entonces que si la llave
está hacia abajo, cuando hay líquido
el relé no estará activado y cuando
no hay líquido se saturará el transistor
y con ello se activará el relé que
podrá poner en contacto a una bomba. Esto
significa que estamos en presencia de un automático
que “llenará” una cisterna
cuando se detecte que el agua está por
debajo de un mínimo.
Ahora bien, supongamos que la cisterna estaba
vacía y que, como dijimos, se pone en marcha
la bomba; rápidamente comenzará
a subir el nivel del líquido como consecuencia
de que se está llenando el tanque y en
algún momento se mojarán los contactos
del sensor B con lo cual en la pata 8 del CD4093
tendré un “1” lógico;
sin embargo como el sensor A está seco,
siguiendo el mismo razonamiento deduciremos que
en la pata 13 del integrado habrá un “0”
y, por lo tanto, el FF no cambiará de estado.
Es decir, por más que se haya mojado el
sensor B, mientras no se moje el sensor A el relé
permanecerá activado y el motor en marcha.
Recién cuando el nivel del agua alcance
un máximo, ambos sensores estarán
cortocircuitados, en la pata 13 tendré
un “1”, en la pata 8 habrá
un “0” ( a causa del inversor formado
por la compuerta inferior), el FF cambiará
de estado, se desenergizará el relé
y se parará la bomba de carga.
Cuando el nivel de agua disminuya, se quitará
el cortocircuito en el sensor A (pero permanecerá
en el sensor B) pero el FF no cambiará
de estado, recién lo hará cuando
el agua descienda por debajo del nivel mínimo
detectado por el sensor B, instante en que volverá
a activarse la bomba de carga.
Ahora bien, si la llave se encuentra hacia arriba,
es decir, se cortocircuitúa el terminal
A con el Terminal B, el funcionamiento del circuito
es inverso y servirá para activar una bomba
de desagote cuando se detecte agua en los dos
sensores y se desactive cuando ya no hay agua
en ninguno de ellos. Esto nos sirve para evitar
que se inunde un sótano y en ese caso deberíamos
poner el sensor B en una depresión por
debajo del piso para que sea lo primero “que
se inunde”, mientras que el sensor A deberá
colocarlo en algún lugar por debajo del
nivel de riesgo de inudación.
Le sugiero que realice una perforación
tipo cámara, colocada en el suelo, que
tenga una superficie de 40 cm x 40 cm con 50 cm
de profundidad; coloque el sensor B a 4 cm por
encima del fondo y el sensor A a 3 cm del borde;
luego la boca de la bomba deberá llegar
a la parte inferior de dicha cámara. Si
piensa un poco, rápidamente comprenderá
el funcionamiento.
Este circuito puede ser empleado en un sin fin
de aplicaciones, sólo debe utilizar su
ingenio para saber qué tipos de sensores
debe colocar en función de la tarea que
deben desarrollar.